Messroboter in der Koordinatenmesstechnik
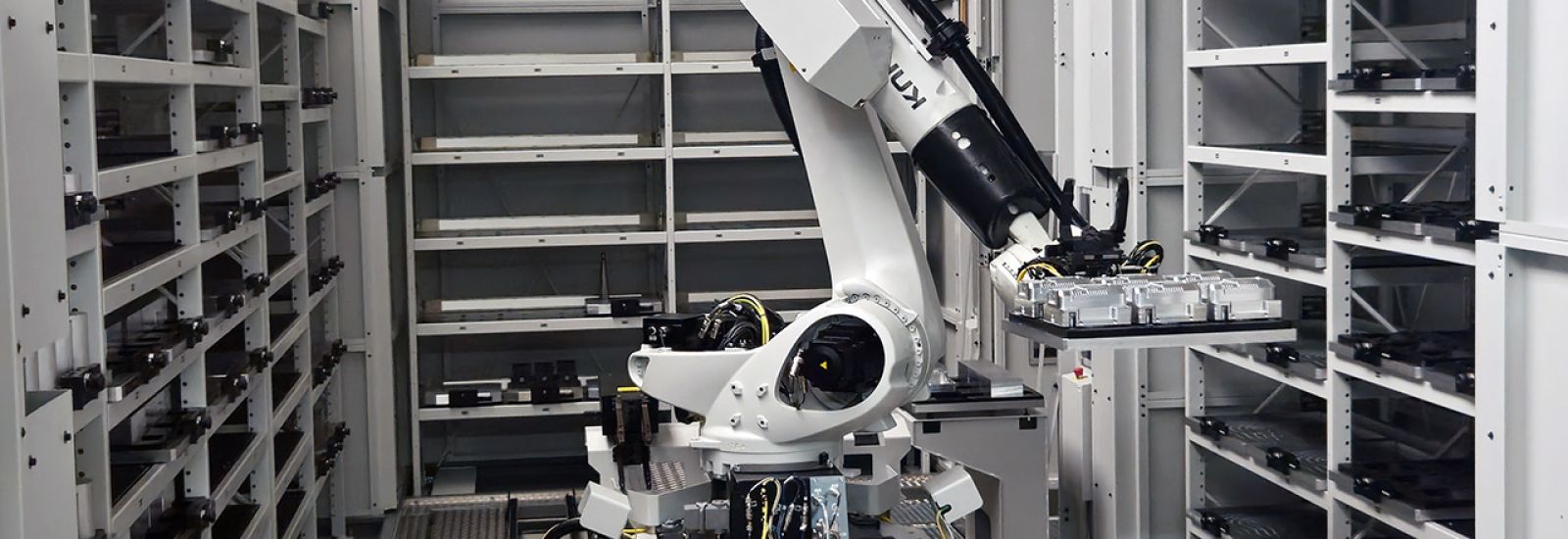
Ein Messroboter kombiniert in der Regel einen mehrachsigen Roboter mit einer messtechnischen Ausrüstung, etwa taktilen Tastern, optischen Sensoren oder kamerabasierten Systemen. Der Roboter bewegt den Sensor zum Messobjekt oder positioniert das Werkstück für die Prüfung. Dadurch lassen sich Geometrien, Lagen, Abstände oder Formmerkmale automatisiert erfassen. Im Unterschied zu reinen Handgeräten oder einzelnen Messstationen ist der Bewegungsablauf programmierbar und auf wiederkehrende Prüfsequenzen ausgelegt.
Typische Einsatzfelder in Fertigung und Qualitätsprüfung
Messroboter werden vor allem dort eingesetzt, wo viele gleichartige Teile geprüft, Prozesse überwacht oder Prüfabläufe in verkettete Anlagen eingebunden werden. Typische Kontexte sind Serienfertigung, Wareneingangsprüfung, Zwischenkontrolle nach Bearbeitungsschritten oder Endprüfung vor der Auslieferung. Sie kommen auch in Zellen zum Einsatz, in denen Bauteile automatisch zugeführt, identifiziert und dokumentiert werden. Besonders relevant sind Anwendungen mit hohem Wiederholungsgrad, kurzen Taktfenstern oder komplexer Bauteilgeometrie.
Aufbau, Sensorik und Integrationsformen
Die Ausprägung eines Messroboters hängt von Sensorprinzip, Genauigkeitsanforderung und Einbindung in die Umgebung ab. Möglich sind taktile Messaufgaben mit Tastern ebenso wie berührungslose Verfahren mit Laser-, Licht- oder Bildsensorik. Systeme können als eigenständige Messzelle, als Teil einer automatisierten Prüfanlage oder in unmittelbarer Nähe zur Produktion betrieben werden. Je nach Aufgabe übernimmt der Roboter die Sensorführung, das Werkstückhandling oder beide Funktionen in einem abgestimmten Ablauf.
Abgrenzung zu anderen Messsystemen
Messroboter unterscheiden sich von klassischen Koordinatenmessmaschinen durch ihren robotischen Bewegungsaufbau und ihre stärkere Ausrichtung auf Automatisierung und Anlagenintegration. Gegenüber handgeführten Koordinatenmessgeräten liegt der Schwerpunkt nicht auf mobiler Einzelmessung, sondern auf reproduzierbaren Programmen. Von 2D-Messmaschinen, berührungslos grenzen sie sich durch die dreidimensionale Bahnführung und breitere Aufgabenstellung ab. Digitalisiermaschinen dienen primär der Flächen- oder Geometrieerfassung für digitale Modelle, während Messroboter auf automatisierte Prüfprozesse in der industriellen Messtechnik ausgerichtet sind.